Recursive Video Lane Detection
Abstract
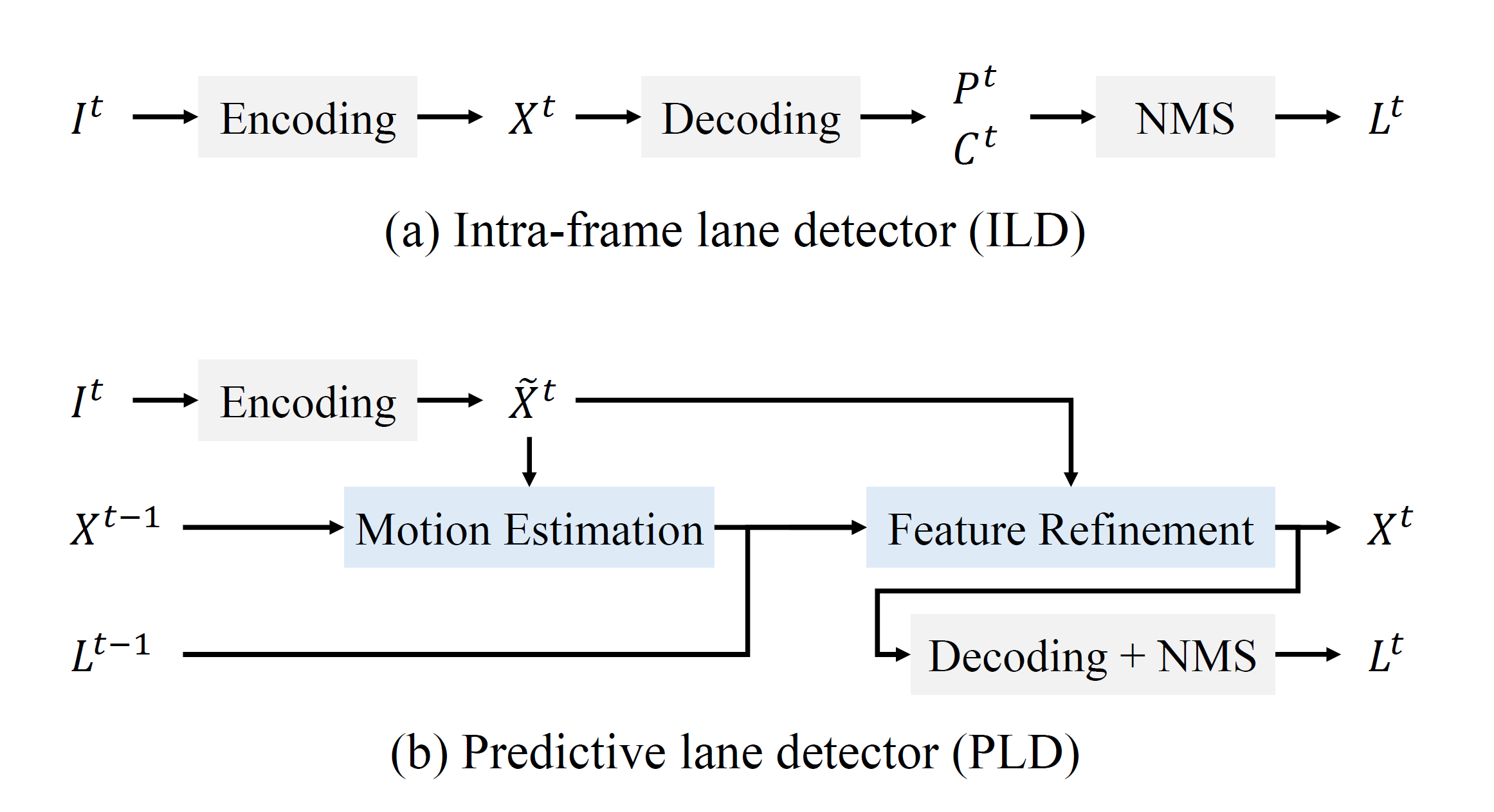
A novel algorithm to detect road lanes in videos, called recursive video lane detector (RVLD), is proposed in this paper, which propagates the state of a current frame recursively to the next frame. RVLD consists of an intra-frame lane detector (ILD) and a predictive lane detector (PLD). First, we design ILD to localize lanes in a still frame. Second, we develop PLD to exploit the information of the previous frame for lane detection in a current frame. To this end, we estimate a motion field and warp the previous output to the current frame. Using the warped information, we refine the feature map of the current frame to detect lanes more reliably. Experimental results show that RVLD outperforms existing detectors on video lane datasets.
Overview
Publication
Dongkwon Jin, Dahyun Kim and Chang-Su Kim,
"Recursive Video Lane Detection," accepted to Proceedings of International Conference on Computer Vision (ICCV), 2023.
[paper] [supp] [code] [video]