Monocular Depth Estimation
Using Relative Depth Maps
Abstract
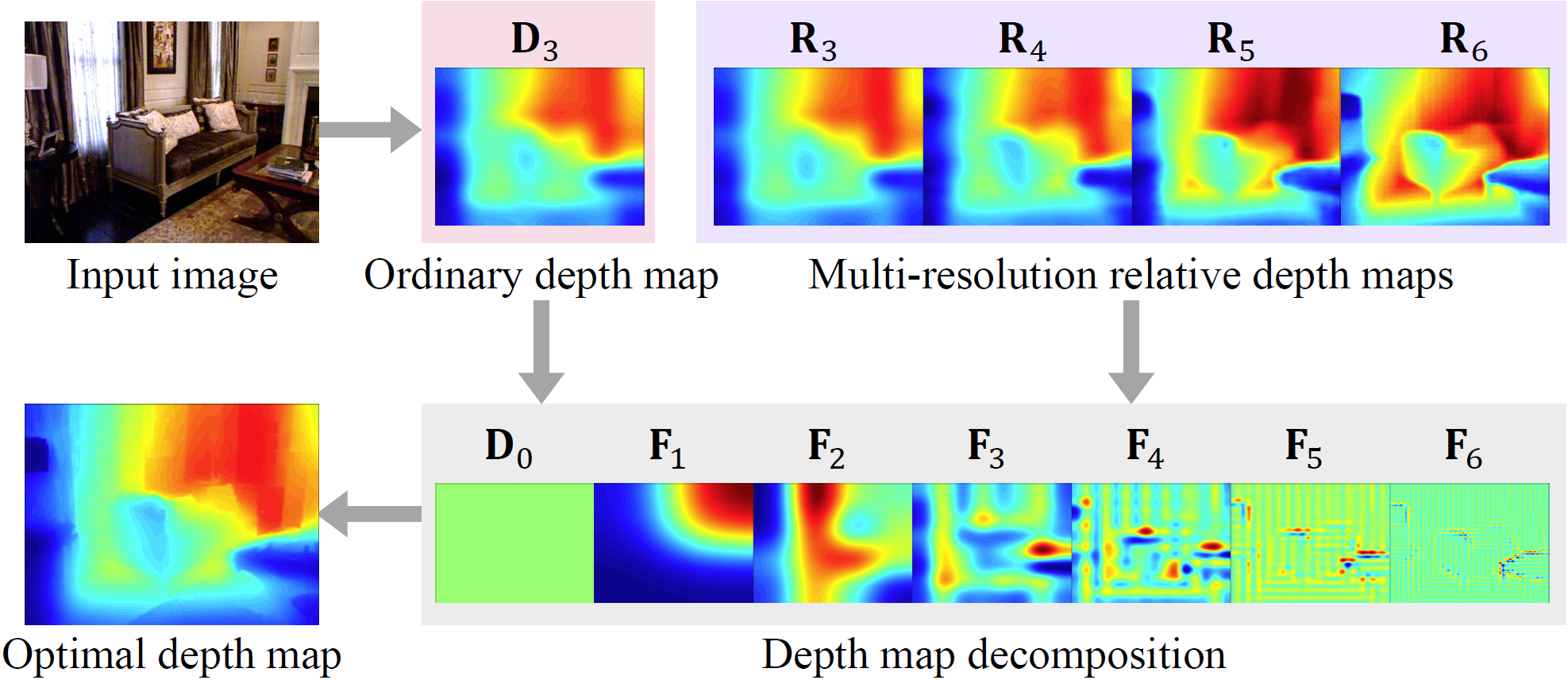
We propose a novel algorithm for monocular depth estimation using relative depth maps. First, using a convolutional neural network, we estimate relative depths between pairs of regions, as well as ordinary depths, at various scales. Second, we restore relative depth maps from selectively estimated data based on the rank-1 property of pairwise comparison matrices. Third, we decompose ordinary and relative depth maps into components and recombine them optimally to reconstruct a final depth map. Experimental results show that the proposed algorithm provides the state-of-art depth estimation performance.
Publication
Jae-Han Lee and Chang-Su Kim,
"Monocular Depth Estimation Using Relative Depth Maps," accepted to Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2019.
[code] [supplementary]